

A segurança é uma preocupação crucial na indústria, principalmente quando se trata da prevenção de colisões contra navios. As colisões podem resultar em danos sérios, perda de vidas humanas e impactos ambientais significativos.
Neste artigo, discutiremos a importância desse projeto que teve como objetivo melhorar a segurança das operações marítimas em um porto privado, projetado para o carregamento e descarregamento de granéis sólidos, a partir de um sistema de anticolisão para detectar, monitorar e evitar potenciais colisões. Tal sistema foi implantado em 3 (três) máquinas que dividem um píer, 2 (dois) carregadores e 1 (um) descarregador.
Os sistemas anticolisão contra navios são essenciais para prevenir colisões entre as máquinas de carregamento/descarregamento contra navios, estruturas costeiras e obstáculos. Neste projeto utilizamos tecnologias avançadas, como radares, sensores, gps, scanner laser para detectar objetos próximos e calcular trajetórias potenciais de colisão.
GPS (Global Positioning System) é um sistema de navegação por satélite que fornece informações precisas de localização, velocidade e tempo em qualquer lugar do mundo. Composto por uma constelação de satélites, estações terrestres e receptores GPS, ele utiliza sinais de rádio para determinar a posição exata do receptor. Além da localização, o GPS também pode calcular velocidade e direção com base nas mudanças na posição ao longo do tempo.
Com as informações fornecidas por ele é possível posicionar as máquinas de forma georeferenciadas em tempo real e utilizando esse posicionamento é possível determinar se as máquinas ou partes dela se encontram em rota de colisão utilizando um módulo dentro da plataforma Lynx RTP que foi desenvolvido para monitorar constantemente as distâncias entre as máquinas e suas partes.
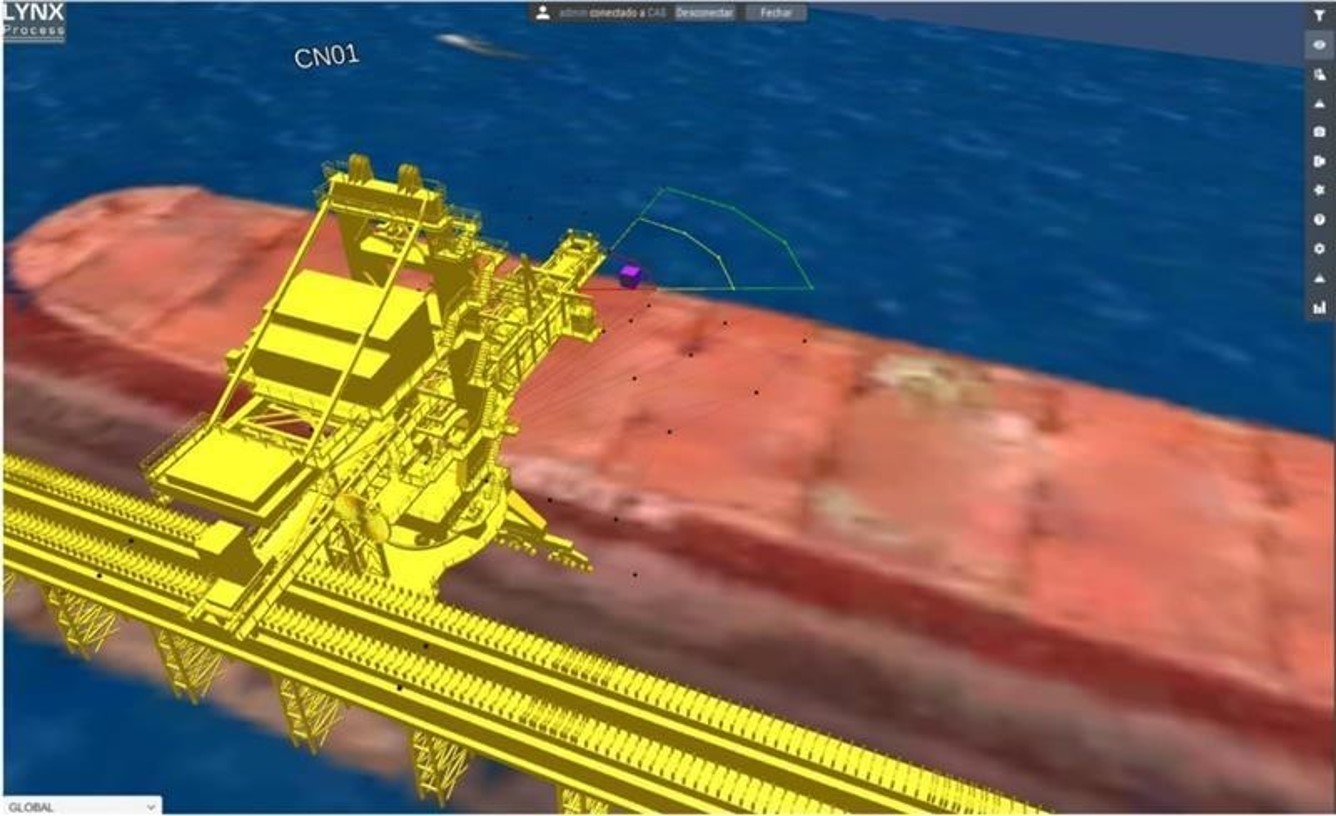
Esse monitoramento utiliza de estruturas nomeadas de cápsulas que englobam partes da máquina e a distância utilizada é justamente a distância entre duas dessas cápsulas. A imagem a seguir exemplifica essa situação.
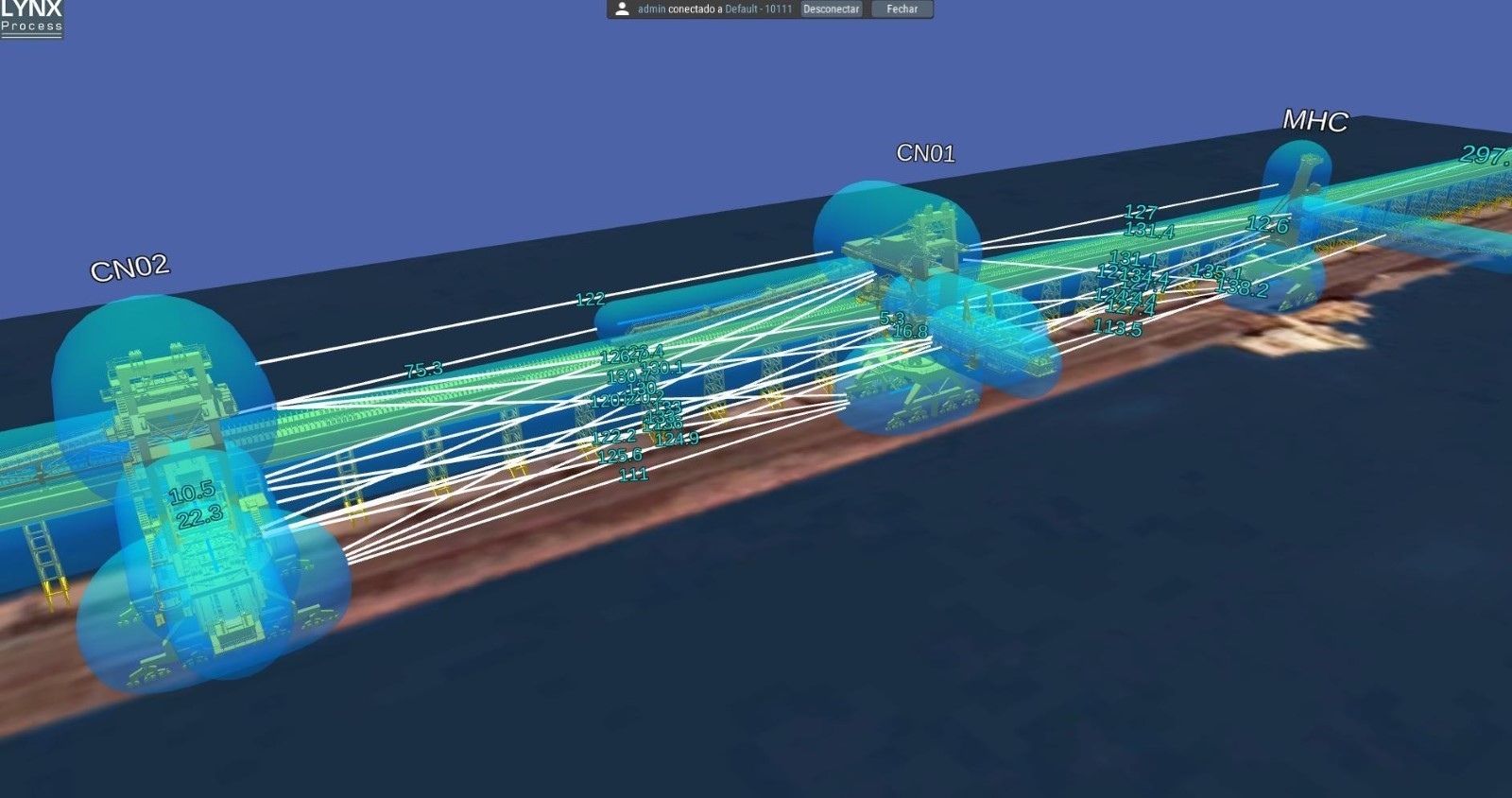
Neste mesmo módulo é possível definir distâncias de segurança, sendo 3 distâncias definidas para o projeto de anticolisão, são elas: bloqueio, redução e aviso.
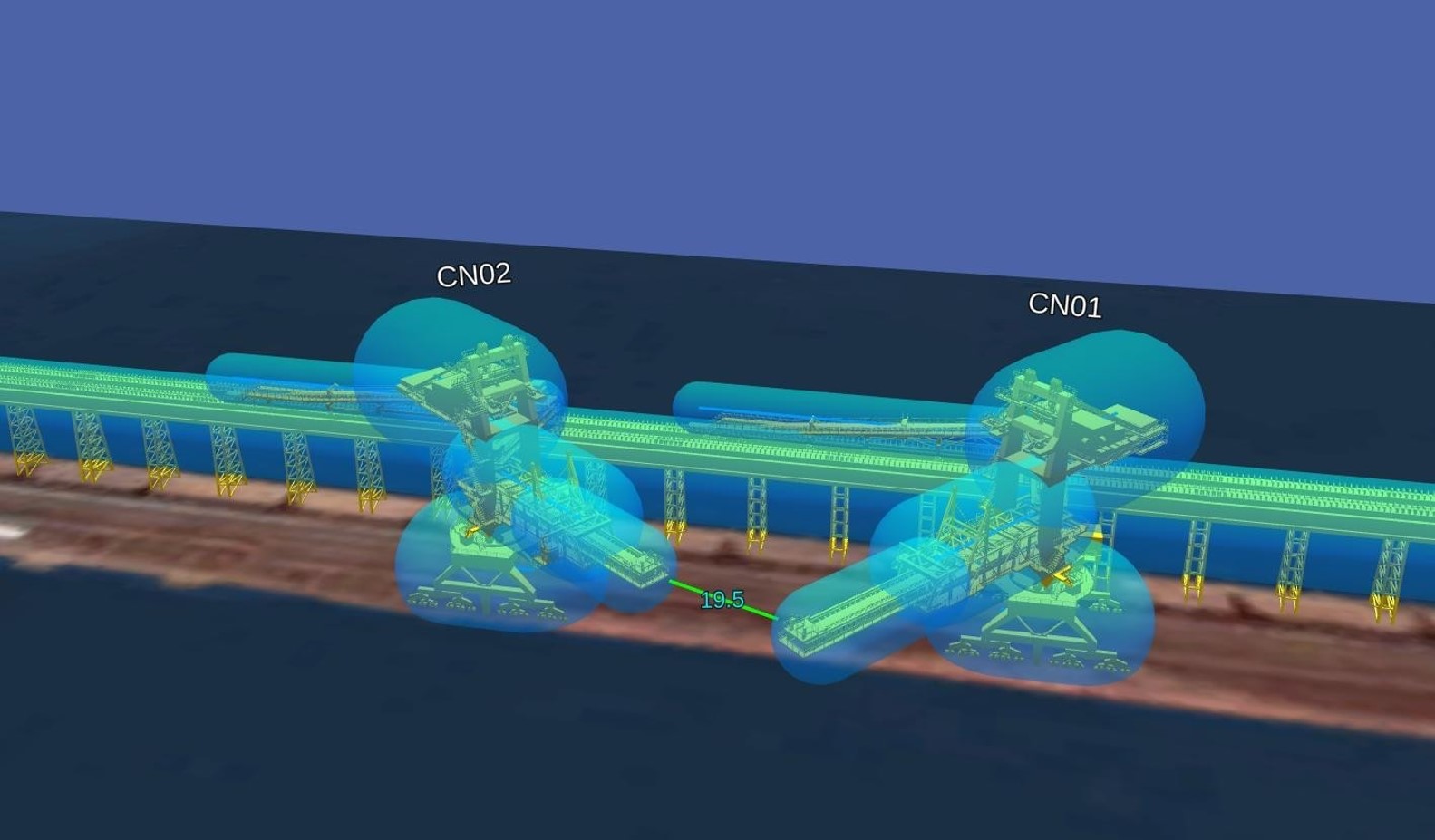
Para uma distância de aviso igual a 20, caso a distância entre as cápsulas for menor que esse valor a linha que indica essa distância passará de branco para verde e um aviso é emitido.
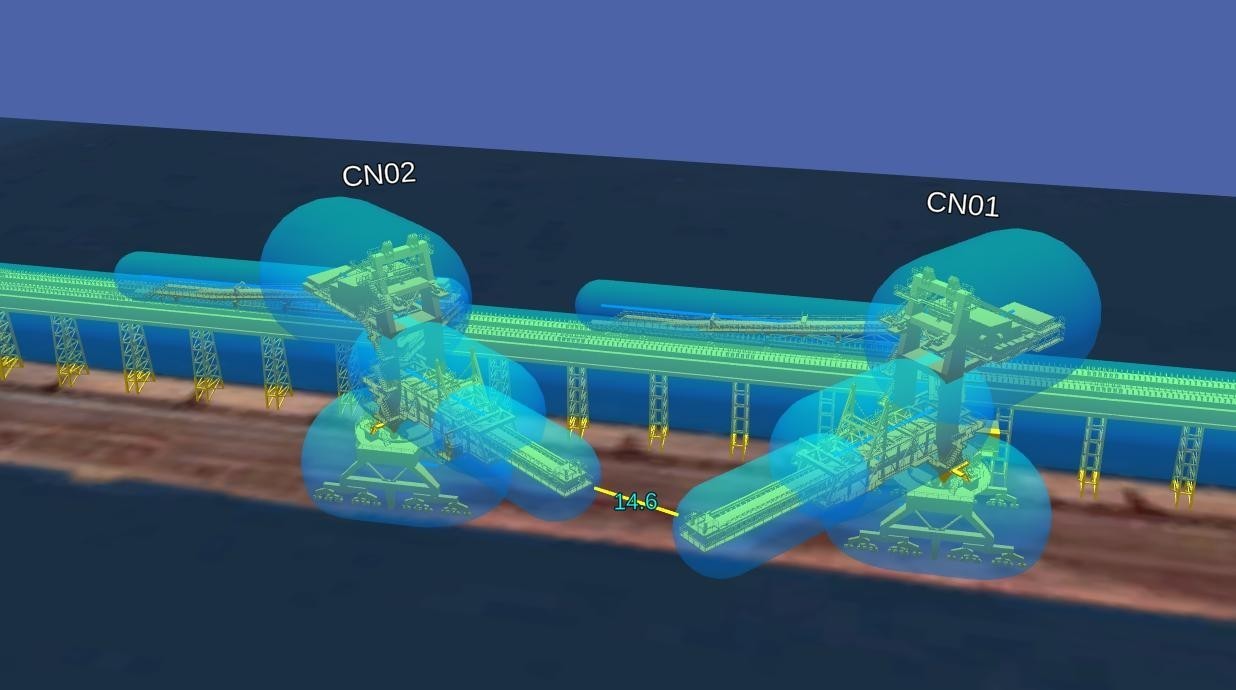
De forma analoga ao que aconteceu com a distância de aviso, o mesmo ocorrerá para a distância de redução. Neste caso, para uma distância menor que 15 a linha vai ficar da cor amarela e a velocidade da máquina ou das partes em risco de colisão sofrerá uma redução.
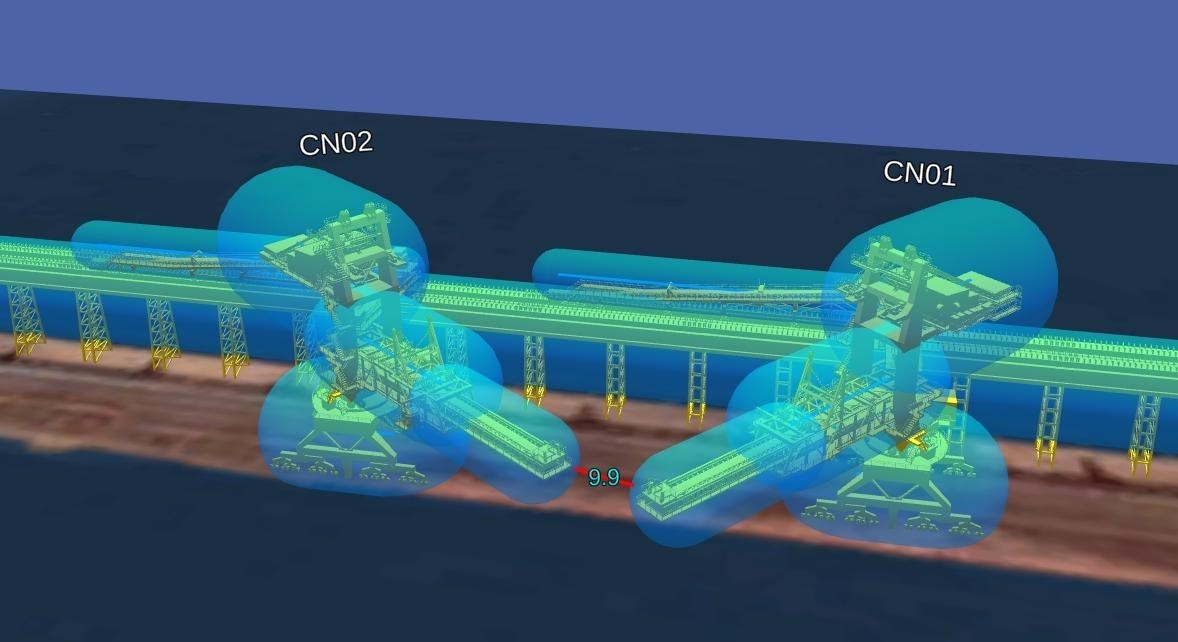
Já para a última distância (bloqueio), a linha ficará vermelha quando uma distância inferior a 10 neste caso for atingida e os movimentos serão bloqueados para assim evitar a colisão.
Um dispositivo que utiliza ondas de rádio para detectar a presença, localização e velocidade de objetos em todas as direções ao redor de um ponto central. Ele fornece uma visão abrangente de 360 graus em um plano bidimensional, permitindo identificar alvos em todas as direções horizontais. O radar emite pulsos de rádio e mede o tempo que leva para o sinal retornar após refletir em um objeto, usando essa informação para determinar a distância e direção dos objetos em relação ao radar
No caso de uma detecção de algum objeto pelo radar, a sua localização é comparada com a localização de zonas pré-definidas ao redor da lança para verificar se esse objeto que foi detectado se encontra dentro de algumas dessas zonas, e caso isso aconteça, a zona será ativada ocasionando dessa forma a ação adequada na máquina.
Sobre essa ação na máquina, as zonas foram definidas de forma análoga ao sistema utilizado no GPS. Neste caso aqui, cada zona possui uma área e está localizada estrategicamente ao redor da lança, formando uma espécie de “escudo”. As zonas mais externas em relação a lança são as zonas de aviso, as intermediárias são as zonas de redução e as zonas mais próximas da lança são as zonas de bloqueio. A ativação dessas zonas tem o mesmo efeito descrito no GPS além das mesmas cores (verde para aviso, amarelo para redução de movimento e vermelho para bloqueio do movimento).
O Scanner 2D utiliza como sua principal tecnologia o LiDAR para medir distâncias com alta precisão. Esses equipamentos emitem pulsos de luz laser e calculam a distância até um objeto com base no tempo de retorno do pulso. Esses sensores realizam varreduras em uma ampla área horizontal, fornecendo informações detalhadas sobre a forma e posição dos objetos. Com uma alta taxa de amostragem, capturam uma grande quantidade de dados rapidamente, sendo ideais para detecção e mapeamento precisos em aplicações como navegação de robôs e detecção de obstáculos.
A forma de atuação do Scanner 2D é a mesma que é utilizada pelo Radar 360°, ou seja, uma comparação da detecção realizada pelo instrumento com as zonas pré definidas entorno da lança.
Juntamente com o Radar 360°, o Scanner 2D é destinado a priori para a proteção de giro e elevação da lança, porém os mesmo podem realizar detecções envolvendo translação dependendo do cenário em que se encontra a máquina.
A câmera ToF (Time-of-Flight) é um tipo de câmera que usa o princípio do tempo de voo para capturar informações tridimensionais de uma cena. Ela emite pulsos de luz infravermelha e mede o tempo que leva para a luz retornar à câmera, permitindo calcular a distância entre a câmera e os objetos em cada ponto da imagem. Isso possibilita a criação de representações tridimensionais em tempo real. As câmeras ToF são amplamente utilizadas em aplicações como detecção de objetos, mapeamento 3D e realidade aumentada, devido à sua capacidade de capturar informações de profundidade de forma rápida e precisa.
Neste equipamento é realizado a configuração de 3 áreas sendo que cada uma representa uma ação a ser executada na máquina da mesma forma já apresentada neste texto (aviso, redução e bloqueio). O próprio equipamento realiza a detecção da presença de algum objeto dentro das áreas configuradas e informa para o sistema qual área que foi acionada e de qual câmera veio esse acionamento. Dessa forma é possível realizar a ação adequada na máquina além de saber de qual região da máquina encontra-se presento o objeto em rota de colisão.
Este equipamento é utilizado na detecção de objetos nas regiões de translação da máquina (trilhos), sendo a sua intervenção diretamente neste movimento.
Com base nesses dados, os sistemas anticolisão emitem alertas e podem até tomar medidas automáticas para evitar colisões iminentes, como reduzir a velocidade e até mesmo bloquear o movimento.
A implementação de sistemas anticolisão proporciona um ambiente mais seguro para a tripulação do navio e pessoal que trabalha nos píeres. Ao evitar colisões, reduz-se o risco de ferimentos e fatalidades. Além disso, a segurança das cargas transportadas é preservada, minimizando o potencial de danos e perdas materiais. Vale lembrar que colisões contra navios podem resultar em vazamentos de óleo e produtos químicos, causando danos graves aos ecossistemas marinhos. Os sistemas anticolisão auxiliam na redução desses incidentes, ajudando a evitar acidentes que possam levar à poluição do meio ambiente. Isso contribui para a preservação da biodiversidade e a sustentabilidade dos ecossistemas marinhos.
Dentre as diversas vantagens do sistema de anticolisão para as máquinas de píer podemos enumerar:
- A implementação de dois carregadores permite a realização simultânea das operações de carga em ambos os lados do navio. Essa abordagem aumenta a eficiência operacional ao reduzir o tempo necessário para completar o carregamento do navio. Quanto menor for o tempo de permanência do navio no porto, menor será o risco de colisões com outros navios em movimento.
- Congestionamentos portuários são uma fonte comum de risco de colisões, quando vários navios estão aguardando para serem carregados ou descarregados, as manobras podem se tornar complexas e aumentar as chances de colisões acidentais. Com a implementação de dois carregadores, o processo de carga é acelerado, reduzindo o tempo de espera dos navios e diminuindo a ocorrência de congestionamentos. Isso, por sua vez, reduz significativamente o risco de colisões entre os navios presentes no porto.
- A utilização de dois carregadores possibilita uma distribuição mais equilibrada da carga nos lados do navio. Essa distribuição adequada da carga contribui para manter a estabilidade da embarcação durante as operações portuárias, minimizando o risco de inclinações excessivas ou desequilíbrios que poderiam levar a colisões. Com uma distribuição de carga equilibrada, o navio mantém uma posição mais estável na água, facilitando as manobras de atracação e desatracação.
- A disponibilidade de dois carregadores, com garantia de anticolisão, permite maior flexibilidade nas operações portuárias. Diferentes tipos de cargas podem ser manipulados simultaneamente, atendendo às necessidades específicas de navios com demandas variadas.
- A presença de um descarregador, operando simultaneamente devido a garantia de anticolisão, melhora a eficiência das operações ao permitir a realização de manobras seguras, mesmo em situações de intenso tráfego portuário.